Rui (Ranger) FAN
About
Rui (Ranger) FAN [范睿] was born in Jining, Inner Mongolia, China, in 02/1993. Rui completed his high school education with the Elite Class at the Affiliated Middle School to Inner Mongolia Normal University in Hohhot, Inner Mongolia, China, in 06/2011. Rui received his B.Eng. degree from the Harbin Institute of Technology in 07/2015, and his Ph.D. degree (thesis title: ''Real-Time Computer Stereo Vision for Automotive Applications'') from the University of Bristol in 06/2018.
From 07/2018 to 02/2020, Rui worked as a Research Associate, under the supervision of Prof. Ming Liu, with the Robotics Institute at the Hong Kong University of Science and Technology. Between 02/2020 and 09/2021, Rui worked as a Postdoctoral Scholar-Employee with Prof. Linda M. Zangwill and Prof. David J. Kriegman at the University of California San Diego. Rui began his faculty career as a Full Research Professor with the College of Electronics & Information Engineering at Tongji University in 10/2021. Rui was promoted to Full Professor in 12/2022 and attained tenure in 12/2024, both in the same college and at the Shanghai Research Institute for Intelligent Autonomous Systems (SRIAS), the State Key Laboratory of Intelligent Autonomous Systems, and Frontiers Science Center for Intelligent Autonomous Systems in 12/2022. Rui directs the Machine Intelligence & Autonomous Systems (MIAS) Group [微信公众号:mias-group] and serves as the General Chair of the Autonomous Vehicle Vision (AVVision) Community.
Rui's research interests include computer vision and deep learning for autonomous driving and robotics.
From 07/2018 to 02/2020, Rui worked as a Research Associate, under the supervision of Prof. Ming Liu, with the Robotics Institute at the Hong Kong University of Science and Technology. Between 02/2020 and 09/2021, Rui worked as a Postdoctoral Scholar-Employee with Prof. Linda M. Zangwill and Prof. David J. Kriegman at the University of California San Diego. Rui began his faculty career as a Full Research Professor with the College of Electronics & Information Engineering at Tongji University in 10/2021. Rui was promoted to Full Professor in 12/2022 and attained tenure in 12/2024, both in the same college and at the Shanghai Research Institute for Intelligent Autonomous Systems (SRIAS), the State Key Laboratory of Intelligent Autonomous Systems, and Frontiers Science Center for Intelligent Autonomous Systems in 12/2022. Rui directs the Machine Intelligence & Autonomous Systems (MIAS) Group [微信公众号:mias-group] and serves as the General Chair of the Autonomous Vehicle Vision (AVVision) Community.
{kind=link}
Rui's research interests include computer vision and deep learning for autonomous driving and robotics.
Featured Publications
|
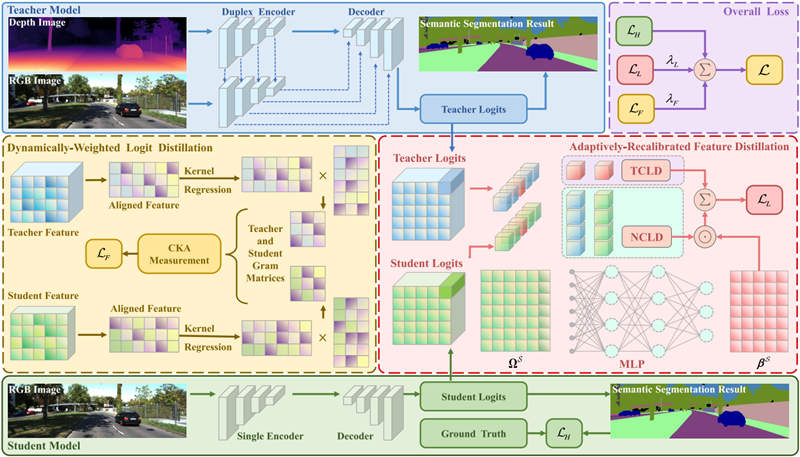
Zhiwei Huang, Yanwei Fu, Yi Zhou, Xieyuanli Chen, Qijun Chen, Rui Fan✉ |
|
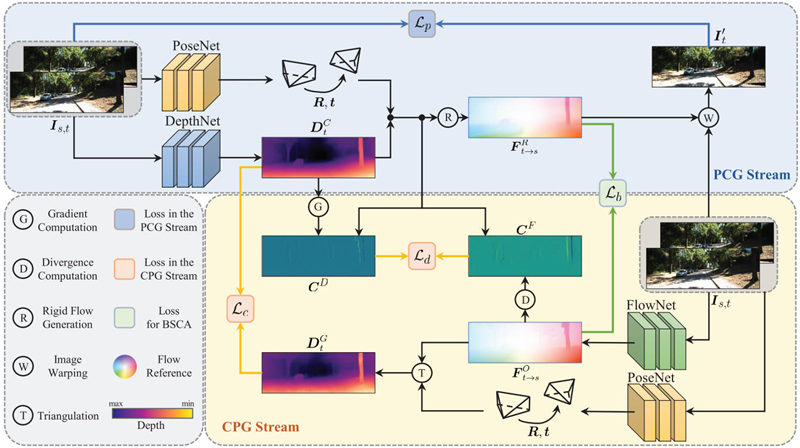
Yi Feng, Junwu E, Zizhan Guo, Yu Ma, Hanli Wang, Rui Fan✉ |
|
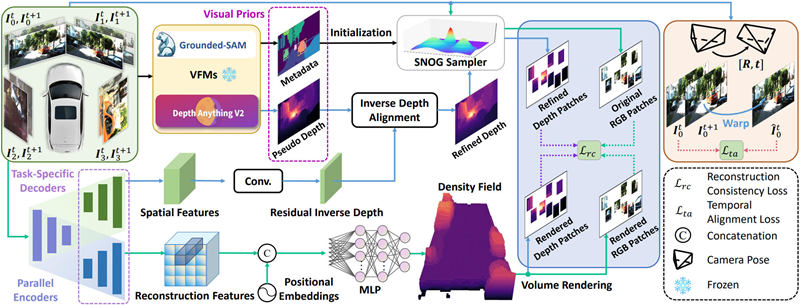
Yikang Zhang, Rui Fan✉ |
|
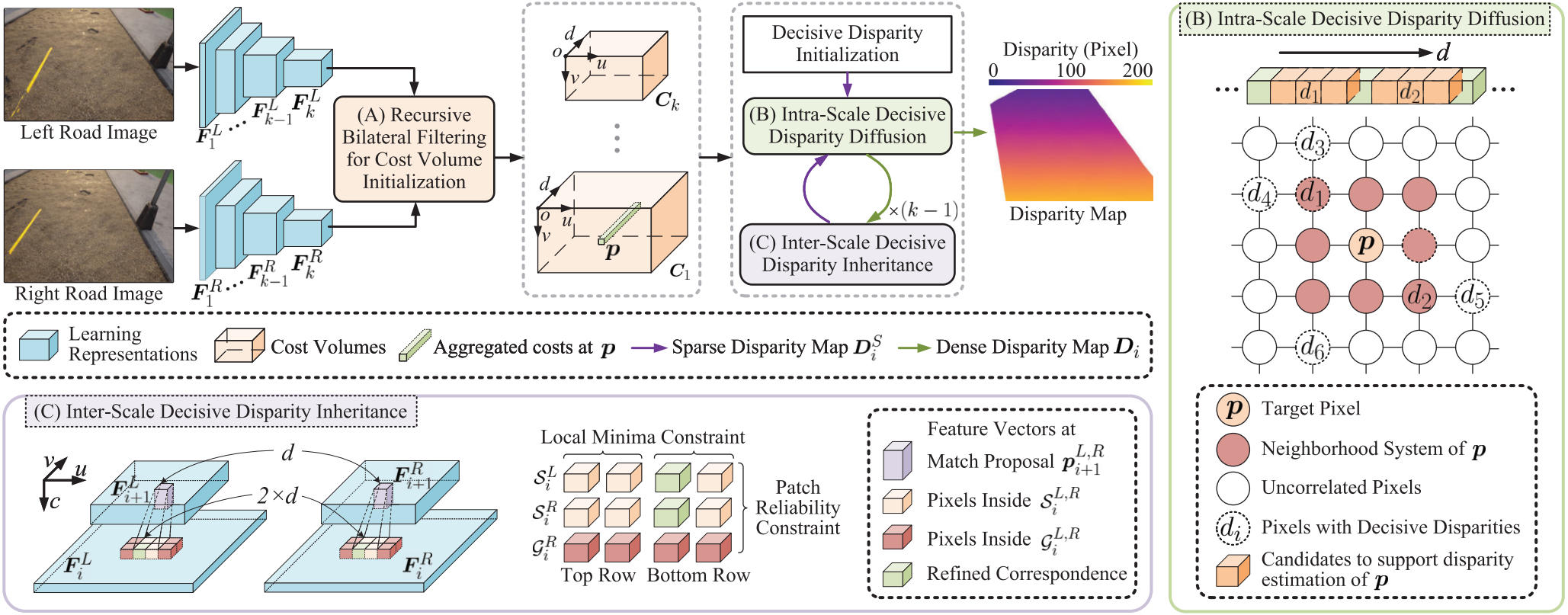
Yu Ma, Zizhan Guo, Zuyi Xiong, Haoran Zhang, Yi Feng, Hongbo Zhao, Hanli Wang, Rui Fan✉ |
|
Sicen Guo, Ziwei Long, Zhiyuan Wu, Qijun Chen, Ioannis Pitas, Rui Fan✉ |
|
Mengtan Zhang, Yi Feng, Qijun Chen, Rui Fan✉ |
|
Chuang-Wei Liu, Yikang Zhang, Qijun Chen, Ioannis Pitas, Rui Fan✉ |
|
Yi Feng, Yu Han, Xijing Zhang, Tanghui Li, Yanting Zhang, Rui Fan✉ |
|
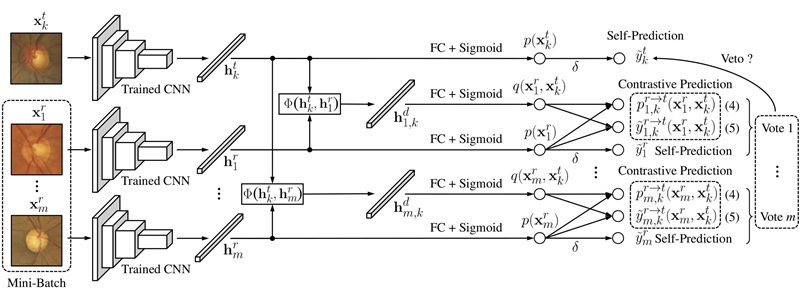
Rui Fan, Christopher Bowd, Nicole Brye, Mark Christopher, Robert N. Weinreb, David J. Kriegman, Linda M. Zangwill |

|
Rui Fan, Christopher Bowd, Mark Christopher, Nicole Brye, James A. Proudfoot, Jasmin Rezapour, Akram Belghith, Michael H. Goldbaum, Benton Chuter, Christopher A. Girkin, Massimo A. Fazio, Jeffrey M. Liebmann, Robert N. Weinreb, Mae O. Gordon, Michael A. Kass, David Kriegman, Linda M. Zangwill |
|
Rui Fan✉, Hengli Wang, Yuan Wang, Ming Liu, Ioannis Pitas |
|
Rui Fan, Hengli Wang, Peide Cai, Ming Liu |
|
Rui Fan, Umar Ozgunalp, Brett Hosking, Ming Liu, Ioannis Pitas |

|
Rui Fan✉, Xiao Ai, Naim Dahnoun |
{kind=link}
Teaching
- • Spring-term lecture “Image Processing & Machine Vision [图像处理与机器视觉]” (100599) for third-year undergraduates majored in Automation and Artificial Intelligence at Tongji University.
- • Fall-term lecture “Deep Learning [深度学习]” (100698) for second/third/fourth-year undergraduates majored in Automation and Artificial Intelligence at Tongji University.
- • Lectures for the 2019 Short Course on Deep Learning & Computer Vision for Autonomous Systems, in Thessaloniki, Greece, invited by Prof. Ioannis Pitas (IEEE Fellow, IEEE Distinguished Lecturer, EURASIP Fellow). [08/2019]
Awards
- • Shanghai Science & Technology 35 Under 35 [上海科技青年35人引领计划] (2024).
- • The First Prize for Science & Technology Innovation from the China Society for the Promotion of Science and Technology Commercialization [中国科技产业化促进会科技创新一等奖] (2024).
- • CCF Senior Member (2024).
- • 2022 Best Paper Award from the Journal of Transportation Safety and Environment.
- • Best Junior Editorial Board Member Award from the journal of Intelligence & Robotics (2025).
- • Xiaomi Young Talents [小米青年学者] (2023).
- • Forbes China List of 100 Outstanding Overseas Returnees [福布斯中国青年海归菁英100人] (2023).
- • IEEE Senior Member (2023).
- • Top 2% of Scientists on Stanford List (2022-2025).
- • Best Student Paper (2021, 2016), the IEEE International Conference on Imaging Systems and Techniques (IST).
- • Best Paper Finalist (2019), the IEEE International Conference on Robotics and Biomimetics (ROBIO).
Services
- • IEEE T-ASE Associate Editor.
- • AAAI Senior Program Committee (SPC) Member (2023-2027).