Rui (Ranger) FAN
About
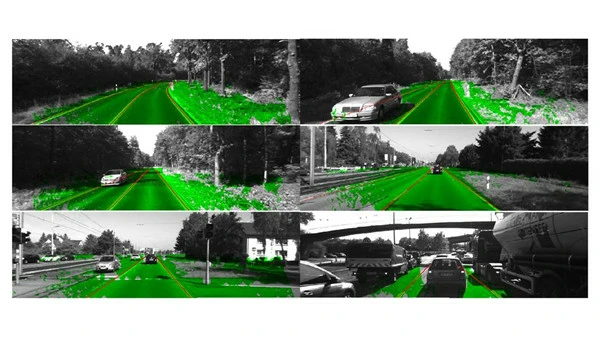
Rui (Ranger) FAN [范睿] was born in Jining, Inner Mongolia, China, in 02/1993. Rui completed his high school education with the Elite Class at the Affiliated Middle School to Inner Mongolia Normal University in Hohhot, Inner Mongolia, China, in 06/2011. Rui received his B.Eng. degree from the Harbin Institute of Technology in 07/2015, and his Ph.D. degree (thesis title: ''Real-Time Computer Stereo Vision for Automotive Applications'') from the University of Bristol in 06/2018.
From 07/2018 to 02/2020, Rui worked as a Research Associate, under the supervision of Prof. Ming Liu, with the Robotics Institute at the Hong Kong University of Science and Technology. Between 02/2020 and 09/2021, Rui worked as a Postdoctoral Scholar-Employee with Prof. Linda M. Zangwill and Prof. David J. Kriegman at the University of California San Diego. Rui began his faculty career as a Full Research Professor with the College of Electronics & Information Engineering at Tongji University in 10/2021. Rui was promoted to Full Professor in 12/2022 and attained tenure in 12/2024, both in the same college and at the Shanghai Research Institute for Intelligent Autonomous Systems (SRIAS), the State Key Laboratory of Intelligent Autonomous Systems, and Frontiers Science Center for Intelligent Autonomous Systems in 12/2022. Rui directs the Machine Intelligence & Autonomous Systems (MIAS) Group [微信公众号:mias-group] and serves as the General Chair of the Autonomous Vehicle Vision (AVVision) Community.
Rui’s research interests include computer vision, deep learning, and robotics.
From 07/2018 to 02/2020, Rui worked as a Research Associate, under the supervision of Prof. Ming Liu, with the Robotics Institute at the Hong Kong University of Science and Technology. Between 02/2020 and 09/2021, Rui worked as a Postdoctoral Scholar-Employee with Prof. Linda M. Zangwill and Prof. David J. Kriegman at the University of California San Diego. Rui began his faculty career as a Full Research Professor with the College of Electronics & Information Engineering at Tongji University in 10/2021. Rui was promoted to Full Professor in 12/2022 and attained tenure in 12/2024, both in the same college and at the Shanghai Research Institute for Intelligent Autonomous Systems (SRIAS), the State Key Laboratory of Intelligent Autonomous Systems, and Frontiers Science Center for Intelligent Autonomous Systems in 12/2022. Rui directs the Machine Intelligence & Autonomous Systems (MIAS) Group [微信公众号:mias-group] and serves as the General Chair of the Autonomous Vehicle Vision (AVVision) Community.
{kind=link}
Rui’s research interests include computer vision, deep learning, and robotics.
Featured Publications

|
Feng, Y., Han, Y., Zhang, X., Li, T., Zhang, Y., Fan, R.✉ |

|
Liu, C.W., Zhang, Y., Chen, Q., Pitas, I., Fan, R.✉ |

|
Feng, Y., Ma, Y., Andreev, S., Chen, Q., Dvorkovich, A., Pitas, I., Fan, R.✉ |

|
Yang, J., Jia, N., Liu, X., Fan, R., Sun, Y. Zhao, W. |

|
Jiao, J., Geng, R., Li, Y., Xin, R., Yang, B., Wu, J., Wang, L., Liu, M., Fan, R., Kanoulas, D. |

|
Feng, Y., Guo, Z., Chen, Q., Fan, R.✉ |

|
Huang, J., Li, J., Jia, N., Sun, Y., Liu, C., Chen, Q., Fan, R.✉ |

|
Wu, J., Wang, C., Li, C., Jiang, Y., Zhang, C., Huang, Y., Qi, Y., Xue, B., Jiao, J., Fan, R., Zhang, W. |

|
Liu, C.W., Chen, Q., Fan, R.✉ |

|
Wang, J., Mao, Y.A., Ma, X., Guo, S., Shao, Y., Lv, X., Han, W., Christopher, M., Zangwill, L.M., Bi, Y.✉, Fan, R.✉ pdf / webpage |

|
Huang, Z., Zhang, Y., Chen, Q., Fan, R.✉ pdf / webpage / code / demo |

|
Li, J., Zhang, Y., Yun, P., Zhou, G., Chen, Q., Fan, R.✉ pdf / webpage / code / demo |
|
Wu, Z., Feng, Y., Liu, CW., Yu, F., Chen, Q., Fan, R.✉ |

|
Guo, S., Li, J., Feng, Y., Zhou, D., Zhang, D., Su, S., Zhu, X., Chen, Q., Fan, R.✉ pdf / webpage |
|
Yang, J., Xue, B., Feng, Y., Wang, D., Fan, R.✉, Chen, Q. |
|
Feng, Y., Zhang, R., Du, J., Chen Q., Fan, R.✉ |

|
Ma, N., Fan, R.✉, Xie, L. |
|
Zhao, H., Zhang, Y., Chen, Q. and Fan, R.✉ |
|
Wu, Z., Li, J., Feng, Y., Liu, C., Ye, W., Chen, Q. and Fan, R.✉ |
|
Han, Y., Long, Z., Zhang, Y.✉, Wu, J., Fang, Z. and Fan, R.✉ |
|
Cheng, J., Zeng, K., Huang, Z., Tang, X., Wu, J., Zhang, C., Chen, X. and Fan, R. |
|
Xue, B., Yan, X., Wu, J., Cheng, J., Jiao J., Jiang, H., Fan, R., Liu, M., Zhang, C. |
|
Tang, X., Chen, X., Cheng, J., Wu, J., Fan, R., Zhang, C. and Zhou, Z. |

|
Zhou, C., Su, S., Chen, Q., Fan, R.✉ |
|
Fan, R., Bowd, C., Brye, N., Christopher, M., Weinreb, R.N., Kriegman, D. and Zangwill, M. L., |
|
Liu, Y., Fan, R., Guo, J., Ni, H., Bhutta, M.U.M. |
|
Feng, Y., Xue, B., Liu, M., Chen, Q., Fan, R.✉ pdf / webpage / demo / code |
|
Wu, Z., Su, S., Chen, Q., Fan, R.✉ pdf / webpage |

|
Fan, R.✉, Guo, S., Bocus, M.J. pdf / webpage |
|
Fan, R., Alipour, K., Bowd, C., Christopher, M., Brye, N., Proudfoot, A. J., Goldbaum, H. M., Belghith, A., Girkin A. C., Fazio, A. M., Liebmann, M. J., Weinreb, N. R., Pazzani, M., Kriegman, J. D., Zangwill, M. L. |
|
Ming, N., Feng, Y., Fan, R.✉ pdf / webpage / demo / code |
|
Fan, R.✉, Ozgunalp, U., Wang, Y., Liu, M. and Pitas, I. pdf / webpage |
|
Liu, Y., Bose, L., Fan, R., Dudek, P., Mayol-Cuevas, W. |
|
Yu, Y., Yun, P., Xue, B., Jiao, J., Fan, R., Liu, M. |

|
Fan, R., Bowd, C., Christopher, M., Brye, N., Proudfoot, A. J., Rezapour, J., Belghith, A., Goldbaum, H. M., Chuter, B., Girkin A. C., Fazio, A. M., Liebmann, M. J., Weinreb, N. R., Gordon, O. Mae., Kass, A. M., Kriegman, J. D., and Zangwill, M. L. pdf / webpage |
|
Wang, H., Fan, R., Cai, P., Liu, M., and Wang, L. pdf / webpage |
|
Wang, H.#, Fan, R.#, Sun, Y. and Liu, M. pdf / webpage |
|
IEEE Trans on Cybernetics (T-Cyb), 2022. Bhutta, M.U.M., Kuse, M., Fan, R., Liu, Y. and Liu, M. pdf / demo |
|
Wu, J., Wang, M., Jiang, Y., Yi, B., Fan, R., and Liu, M. pdf / code |
|
Fan, R., Wang, H., Cai, P., Wu, J., Bocus, M.J., Qiao, L. and Liu, M. pdf / webpage |
|
Fan, R.✉, Wang, H., Wang, Y., Liu, M., and Pitas, I. pdf / code |
|
Wang, H.#, Fan, R.#, Cai, P., and Liu, M. pdf / webpage / code / demo |
|
Wang, H., Fan, R., and Liu, M. pdf / webpage / demo |
|
Wang, H., Fan, R., and Liu, M. pdf / webpage / demo |
|
Wang, H., Sun, Y., Fan, R., and Liu, M. pdf / code / demo / supp |
|
Wang, H.#, Fan, R.#, Cai, P., and Liu, M. pdf / dataset / code / demo / supp |
|
Fan, R.✉, Wang, H., Xue, B., Huang, H., Wang, Y., Liu, M. and Pitas, I. pdf / webpage / dataset / code / demo |
|
Yi-Ge, E., Fan, R., Liu, Z. and Shen, Z. pdf / supp |
|
Wang, H., Fan, R. and Liu, M. pdf / webpage / code / demo |
|
Wang, H.#, Fan, R.#, Sun, Y. and Liu, M. pdf / code |
|
Fan, R., Wang, H., Cai, P. and Liu, M. pdf / webpage / code / dataset / demo |
|
Yuan, W., Fan, R., Wang, M.Y. and Chen, Q. pdf / code / demo |
|
Fan, R. and Liu, M. pdf / code |
|
Fan, R., Ozgunalp, U., Hosking, B., Liu, M. and Pitas, I. pdf / dataset / supp |
|
Jiao, J., Yu, Y., Liao, Q., Ye, H., Fan, R. and Liu, M. pdf / code |
|
Jiao, J., Fan, R., Ma, H. and Liu, M. |
|
Fan, R.✉, Ai, X. and Dahnoun, N. pdf / dataset |
|
Ozgunalp, U., Fan, R., Ai, X. and Dahnoun, N. pdf / demo |
{kind=link}
Teaching
- • Spring-term lecture “Autonomous and Intelligent Unmanned Systems [自主智能无人系统]” (1000652000201) for first-year Ph.D. students at the Shanghai Research Institute for Intelligent Autonomous Systems.
- • Spring-term lecture “Intelligent and Autonomous Robots and Systems [智能自主机器人与系统]” (100604) for second/third-year undergraduates majored in Mathematics and Applied Mathematics, Applied Physics, Artificial Intelligence at Tongji University.
- • Spring-term lecture “Image Processing & Machine Vision [图像处理与机器视觉]” (100599) for third-year undergraduates majored in Automation and Artificial Intelligence at Tongji University.
- • Fall-term lecture “Deep Learning [深度学习]” (100698) for second/third/fourth-year undergraduates majored in Automation and Artificial Intelligence at Tongji University.
- • Book chapter “Computer Stereo Vision for Autonomous Driving: Theory and Algorithms” (for undergraduates and postgraduates).
- • Rui’s lecture material “Introduction to Autonomous Car Vision” has been used for the Computer Vision, Machine Learning, and Autonomous Systems Web Lecture Series.
- • Lectures for the 2019 Short Course on Deep Learning & Computer Vision for Autonomous Systems, in Thessaloniki, Greece, invited by Prof. Ioannis Pitas (IEEE Fellow, IEEE Distinguished Lecturer, EURASIP Fellow). [08/2019]
- • Teaching Support Assistant at the University of Bristol. The units undertaken include: (1) Mathematics for Signal Processing and Communications (for Ph.D. students); (2) Image Processing and Computer Vision (for M.Sc. & B.Sc. students); (3) Optimization Theory and Applications (for M.Sc. students); and (4) Engineering Mathematics 1 & 2. (for B.Sc. students). [01/2017 – 05/2018]
Talks & Seminars
- • Talk “RGB+X Scene Parsing: Five Years of Explorations by the MIAS Group” on ACCV 2024 Workshop on Multispectral Imaging for Robotics and Automation (MIRA). [12/08/2024]
- • Talk “Explorations in Driving Scene Understanding with Recent Vision Foundation Models” on China-SAE Congress & Exhibition (SAECCE) 2024 (Session: AI Foundation Models and End-to-end Autonomous Driving). [11/13/2024]
- • Talk “面向移动机器人的RGB-X特征融合场景解析” on The 1st China Embodied AI Conference [中国具身智能大会]. [03/30/2024]
- • Talk “Computer Vision and Machine Learning for Intelligent Road Inspection” on 2024 7th International Conference on Advanced Algorithms and Control Engineering. [03/01/2024]
- • Talk “面向无人驾驶可行驶区域检测的数据融合场景解析” on 2023中国智能车大会-人机共驾技术与实现专题论坛. [07/03/2023]
- • Talk “面向安全舒适自动驾驶的视觉环境感知” on 2023中国智能车大会-车路云智能协同控制技术专题论坛. [07/03/2023]
- • Talk “从传统几何方法到深度神经网络——机器人环境感知算法的进化” on 同济九三“同科讲堂”. [06/14/2023]
- • AI Live Talk “面向移动机器人的道路环境感知” on 深蓝学院 (Virtually). [04/11/2023]
- • Invited Talk “Computer Vision and Deep Learning for Urban Scene Understanding” on Sino-Sweden Bilateral Seminar on Vehicle-road Interaction and Driving Safety (Virtually). [11/12/2022-11/13/2022]
- • IEEE International School of Imaging Keynote Lecture “Computer Vision and Machine Learning for Intelligent Road Inspection” on the 2022 IEEE International Conference on Imaging Systems and Techniques (IST 2022) (Virtually). [06/21/2022-06/23/2022]
- • Keynote Talk “3-D Computer Vision for Road Condition Assessment”, invited by Artificial Intelligence, Machine Learning and Data Science World Forum (Virtually). [03/21/2022-03/23/2022]
- • Talk “Computer Vision for Driving Scene Understanding”, invited by 2D3DAI (Virtually). [10/25/2021]
- • Keynote Talk “On the Way to Autonomous Driving: AI Brings a New Dimension to Machine Vision”, invited by GNSS and LBS Association of China and Wuhan University (Virtually). [01/2021]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Awards
- • Shanghai Science & Technology 35 Under 35 [上海科技青年35人引领计划] (2024).
- • The First Prize for Science & Technology Innovation from the China Society for the Promotion of Science and Technology Commercialization [中国科技产业化促进会科技创新一等奖] (2024).
- • CCF Senior Member (2024).
- • 2022 Best Paper Award from the Journal of Transportation Safety and Environment.
- • Best Junior Editorial Board Member Award from the journal of Intelligence & Robotics.
- • Xiaomi Young Talents [小米青年学者] (2023).
- • Forbes China List of 100 Outstanding Overseas Returnees [福布斯中国青年海归菁英100人] (2023).
- • IEEE Senior Member (2023).
- • Top 2% of Scientists on Stanford List (2022, 2023, 2024).
- • Best Student Paper (2021, Student: Jiahe Fan): Deep Convolutional Neural Networks for Road Crack Detection: Qualitative and Quantitative Comparisons, the 2021 IEEE International Conference on Imaging Systems and Techniques (IST).
- • BrightFocus Foundation Travel Grant Award (2021): Deep Learning for Detecting Glaucoma in the Ocular Hypertension Treatment Study: Implications for Clinical Trial Endpoints, Association for Research in Vision and Ophthalmology (ARVO) Annual Meeting 2021.
- • Best Paper Finalist (2019): Road Curb Detection Using a Novel Tensor Voting Algorithm, the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO).
- • Best Student Paper (2016): Faster-than-real-time linear lane detection implementation using SoC DSP TMS320C6678, the 2016 IEEE International Conference on Imaging Systems and Techniques (IST).
![Shanghai Science & Technology 35 Under 35 [上海科技青年35人引领计划] (2024)](../awards/shanghai_35u35.jpg){kind=link}
![The First Prize for Science & Technology Innovation from the China Society for the Promotion of Science and Technology Commercialization [中国科技产业化促进会科技创新一等奖]](../awards/s&t1stprize2024.jpg){kind=link}
{kind=link}
{kind=link}
![Xiaomi Young Talents [小米青年学者] (2023)](../awards/rfan_xiaomi_2023.webp){kind=link}
![Forbes China List of 100 Outstanding Overseas Returnees [福布斯中国青年海归菁英100人] (2023)](../awards/forbes_100oor.webp){kind=link}
{kind=link}
Services
Journal Editors/Co-Editors
- • Guest Editor of Special Issue based on Advanced Electromagnetic Sensing Technologies for Structural Health Monitoring of IEEE Sensors Journal.
- • Guest Editor of Special Issue: Eco-Safe and Efficient Automated Driving in Mixed Traffic: Theory and Applications of Transportation Safety and Environment.
- • Guest Associate Editor in Robot and Machine Vision of Frontiers in Robotics and AI.
Conference/Workshop Organizers
- • Senior Program Committee (SPC) Member of the AAAI Conference on Artificial Intelligence (AAAI) 2025, AAAI 2024, AAAI 2023.
- • Associate Editor of 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
- • Associate Editor of 2023 IEEE International Conference on Robotics and Automation (ICRA).
- • General Chair of the 1st Workshop on Urban Digital Twins for Intelligent Road Inspection (UDTIRI), in conjunction with the 2022 IEEE International Conference on Big Data (IEEE BigData 2022).
- • General Chair of the 3rd Autonomous Vehicle Vision (AVVision) Workshop, in conjunction with the 2022 European Conference on Computer Vision (ECCV’22).
- • General Chair of the Autonomous Vehicle Vision (AVVision) Special Session at the IEEE International Conference on Image Processing (ICIP) 2022.
- • General Chair of the 2nd Autonomous Vehicle Vision (AVVision) Workshop, in conjunction with the 2021 International Conference on Computer Vision (ICCV’21).
- • General Chair of the Autonomous Vehicle Vision (AVVision) Special Session at the IEEE International Conference on Autonomous Systems (ICAS) 2021.
- • Plenary Chair of the 2021 IEEE International Conference on Imaging Systems and Techniques (IST).
- • Technical Program Committee Member & General Chair of the Autonomous Vehicle Vision (AVVision) Special Session at the IEEE International Conference on Image Processing (ICIP) 2021.
- • General Chair of the 1st Autonomous Vehicle Vision (AVVision) Workshop, in conjunction with the 2021 Winter Conference on Applications of Computer Vision (WACV’21).
- • Innovation Program Chair of the 2019 IEEE International Conference on Imaging Systems and Techniques (IST).
Journal Reviewers
TIP, TCyb, TNNLS, TITS, TIV, TII, TMech, TCSVT, SPM, RAL, AURO, Ophthalmology, iScience.
Conference Reviewers:
ICCV'21/23, CVPR'21/24/25, ECCV'18/20/22/24, AAAI'21/22/23/24/25, ICME'21/23, WACV'21/22/23, BMVC'20/21/24, ICRA'20/21/22/23/24/25, IROS'19/20/21/22/23/24.